| значительно уменьшать
импульс торможения КА в процессе его выхода на
орбиту спутника планеты, реализуемый с помощью
ЖРД. Минимизация тормозного импульса
обеспечивается в этом случае за счет вывода
аппарата в плоскость, примерно совпадающую с
плоскостью орбиты Фобоса, и обеспечения
поминальной высоты перицентра подлетной
гиперболы, всего лишь на 300 км превышающей
высоту орбиты Фобоса. Как показали проектные
расчеты, при использовании ЭРДУ масса полезной
нагрузки, доставляемой к Марсу при выбранных
параметрах траектории КА, оказывается на 150-200 кг
большей по сравнению с массой, выводимой с
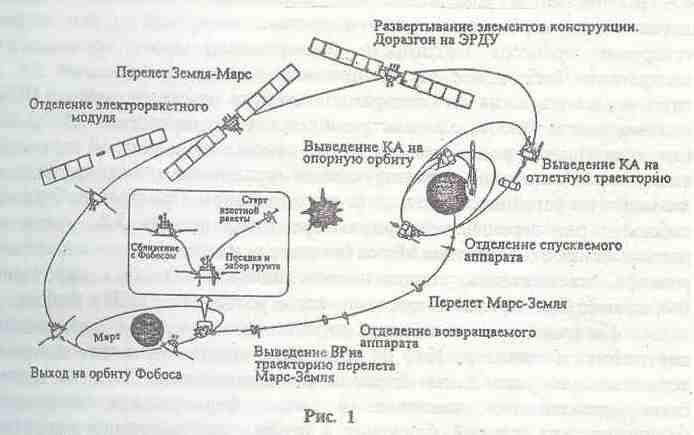
применением только ЖРД. Схема перелета
Земля-Марс показана на рисунке
Основу ЭРДУ составляют три связки из трех стационарных плазменных двигателей СПД-100. Электрическая мощность для обеспечения их функционирования вырабатывается солнечными батареями с кремниевыми фотопреобраэователями. Удельная тяга СПД-100 - 2100 с, КПД преобразования электрической мощности в тягу двигателя - 0,52, мощность одного двигателя на расстоянии 1 а. е. от Солнца — порядка 2.5 кВт , тяга ~ 12.7 г. В основу навигационных расчетов
закладывается допущение о том,что фактическая
тяга двигателя отличается от расчетной в
пределах ± 5%, а ориентация ее вектора в
инерциальном пространстве в каждый, текущий Наиболее сложными в сценарии проекта «Фобос-грунт» являются сближение космического аппарата с Фобосом и посадка на его поверхность, частично апробированная при управлении КА «Фобос-2» в 1989 г. На этом ответственном этапе предусматривается использование совокупности автономных оптических и радиолокационных измерении, включающих в себя получение серии снимков самого Фобоса при помощи бортового телевизионного комплекса с целью уточнения параметров движения аппарата в гравитационном поле Фобоса, минимизации ошибок прогнозирования необходимых маневров КА и выбора оптимальной длительности их исполнения. Применение радиолокационных измерений посредством приборов бортового радиокомплекса в диапазоне высот от 400 до 10 км в дополнение к телевизионным снимкам обусловит значительное повышение полноты состава измерений и тем самым ускорение процесса сходимости (фазирования) орбит космического аппарата и Фобоса. На заключительном участке причаливания КА к спутнику и посадки на него аппарат должен быть переведен с орбиты ИСМ на поверхность Фобоса с параметрами скорости их соударения 0,5±0,2 м/с (при ориентации продольной оси КА по отношению к местной вертикали посадочной площадки), гарантирующими ограниченную энергию удара и дальнейшую устойчивость аппарата на поверхности. При этом необходимо соблюсти рад ограничений при выборе точки посадки КА, учесть ее расположение относительно Марса (видимость планеты), условия местного рельефа, освещенность, радиовидимость аппарата с Земли, с территории РФ, а также благоприятные кинематические условия старта ВР с Фобоса. По своей сути сближение космического аппарата с марсианским спутником и посадка КА на его поверхность являются задачами терминального управления объектом с ограничениями. Часть их может быть принята во внимание в ходе формирования начальных баллистических условий сближения, а другая - при построении алгоритма управления КА уже в процессе сближения. Поэтому в составе математического обеспечения работы бортового комплекса управления космического аппарата предусматриваются блоки вычисления полного вектора состояния КА на основе априорной и измерительной информации, модели движения аппарата относительно Фобоса, решения краевых задач определения радиальной и трансверсальной скоростей их сближения, коррекции прогнозируемой точки посадки КА и ее совмещения с заданной я, наконец, расчета прецизионного торможения аппарата непосредственно у .поверхности Фобоса. Суммарная характеристическая скорость КА, потребная для фазирования орбиты аппарата, его сближения с Фобосом и посадки на него, составляет 246 м/с. Длительность пребывания КА на орбитах ИСМ согласно разным схемам перелета аппарата и режимам управления им оценивается от одного до нескольких месяцев, а этап сближения с Фобосом и посадки на него занимает 1,5-2 ч. Работа КА на поверхности Фобоса строится исходя, прежде всего, из возможности обеспечения функционирования бортовых систем и подзаряда буферной батареи в течение 2,5 ч видимости Солнца на каждом витке орбиты спутника Марса с периодом 7 ч 39 мин. При штатном режиме функционирования бортовых систем отделение ВР от Фобоса. производится на четвертом витке с помощью пружинных толкателей, причем начальная ее скорость - 1 м/с. После этого включаются двигатели стабилизации ракеты, а затем двигатель большой тяги. Вывод ВР на траекторию перелета Марс-Земля происходит в июне-августе 2007 г. по трехимпульснон схеме с использованием двух промежуточных, орбит ИСМ с периодами обращения аппарата по ним, равными 3,3 и 3,0 сут. Суммарная характеристическая скорость разгона ВА к Земле по такой схеме составляет 2,1 км/с. Исходя из условий оптимизации асимптотических скоростей отлета возвращаемого аппарата с орбиты Марса и подлета ВА к Земле выбрана межпланетная его траектория, обеспечивающая при продолжительности перелета 285 сут. прилет к Земле в апреле-июне 2008 г, - в зависимости от времени старта ВР- и скорость входа аппарата в атмосферу на высоте 100 км,небольшую 11,56 км/с при угле входа 30±10° Полет ВА в сфере действия Земли происходят по попадающей траектории со стороны северного полушария с использованием двух заключительных ее коррекций за 10 сут. и за 12-24 ч до момента входа аппарата в атмосферу в условиях непрерывной его видимости управляющими наземными средствами. При этом диапазон широт района посадки КА зависит от его отклонений по углу входа, а долгота района посадки может быть подобрана с применением маневра коррекции траектории аппарата на участке его подлета к Земле. Движение спускаемого аппарата (СА) с нулевым аэродинамическим качеством в атмосфере Земли по баллистической траектории включает в себя участок аэродинамического торможения СА, на котором его скорость уменьшается с гиперзвуковой (M=41) до дозвуковой, и участок парашютного спуска аппарата при помощи двухкаскадной парашютной системы, начиная с высоты 19-27,3 км (параллельно рассматривается также вариант с надувным тормозным устройством Эффективное аэродинамическое торможение спускаемого аппарата обеспечивается за счет сегментально-цилиндрической формы его корпуса {диаметр 0,4 м) с высоким коэффициентом лобового сопротивления (Сх=1,55) при М > 5. Для парашютирования СА последовательно используются вводимые в набегающий поток при скорости 148-283 м/с тормозной (площадью 0.95) и основной (площадью 6 м2) парашюты. Это позволит достичь посадочной скорости аппарата 5,8-6,5 м/с. Общее время его спуска в атмосфере составляет от 1800 до 2300 с {время 45-50 с приходится на участок аэродинамического торможения СА, а 1750-2250 с - на парашютирование, что удовлетворяет требованиям к обнаружению аппарата средствами поисково-спасательного комплекса). Вся последовательность операций по снижению СА и его посадке осуществляется автоматически по командам бортового программно-временного пиротехнического устройства. |